
----------------------------------------------------------------------------------Welcome To this Blog--------------------------------------------------------------------------- I want to share my knowledge about Robotics Basics.Sensor Design.mechanical Design.*For any query,feel free to mail or add comment.
Sunday, November 13, 2011
Sunday, August 29, 2010
PATHFINDER Contd....PART 2

Input system:
Line sensor module:
LED PHOTRANSISTOR pair
Each sensor module consists of one emitter (LED) and one receiver (Photo transistor).
If white surface is present beneath the LED, rays are reflected and are sensed by the receiver phototransistor’s base, the phototransistor gets on.
While in case of black surface, the light gets absorbed and hence receiver phototransistor become off.
Thus the presence of white and black surface is sensed by the sensor module and the system can follow a line.
IR obstacle sensor module::
IR LED for emitter IR photodiode for receiver
The obstacle sensor consists of one emitter (IR LED) and one receiver (IR Photo diode).
If obstacle is present the IR rays are reflected back and are sensed by the receiver photo diode, the photo diode gets forward biased (on).
While in case of no obstacle, the IR rays don’t get reflected back and hence receiver photo diode become reverse biased (off).
Thus the presence of obstacle is sensed by the sensor module.
CONTD.........
Tuesday, August 10, 2010
PATHFINDER...PART-1
PATHFINDER
PATHFINDER

Block diagram :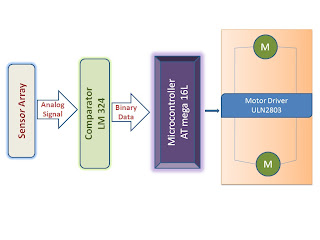
REST PART WILL BE PUBLISHED SOON.................
PATHFINDER

Aim: - A fully autonomous line tracking and sensing robot.
Objective:
A fully autonomous robot capable to sense obstacle from the middle of any grid and take automatic decision of what turn is to be taken. And when no obstacle is sensed it will follow line and will stop at the mid point of the next grid. Thus it can travel through the grids avoiding obstacles (closed door of grid) and ultimately stops at the last grid where no door kept open.
Abstract:
The robot ‘Path Finder’ is a self operating robot that detects any obstacle being present in front of it and turns 90 degree and follows a line that is drawn on the floor. The path consists of a black line on a white surface (or vice versa).The control system used must sense a line and maneuver the robot to stay on course, while constantly correcting the wrong moves using feedback mechanism, thus forming a simple yet effective closed loop System. The robot is designed to follow only obtuse angles where 90 maximum 90 degree turn is required. Now the control system as well senses any obstacle and taking 90 degree turn.
Arena has 9 grids with total 12 doors. The floor is black containing white strip at centre. Some doors will be closed and there will be only one path open the robot has to move along the path.
Basic design and requirements:
The robot is built using ATmega16L (micro controller IC), L293D (comparator IC), LED, photo transistor [L14G3] (line sensor module), IR emitter receiver module (obstacle sensor).
The base of the robot is made wooden and two stepper motor controls its locomotion with a supporting caster wheel in front.
When the obstacle sensor detects any obstacle it automatically 90 degree turn and goes to next cell following a line given on the floor.
Thus it can travel a (N*N) grid matrix without colliding with closed door and following a straight line to remain in the center position of grid always.
Basic operation:
The basic operation of the robot can be broadly classified under 3 categories:
1. obstacle sensing
2. line sensing
3. locomotion controlling
Block diagram :

- First sensor array senses the ambient like obstacle sensing and line sensing, as a continuous analog voltage form.
- Next this analog signal is fed to comparator unit and made digital on off pulse depending upon the threshold limit.
- This digital input is fed as input of micro controller unit and it processes the input.
- Micro controller unit produces output that controls the locomotion of the robot: micro controller output is fed at motor driver unit that gives sufficient current to drive the motor.
REST PART WILL BE PUBLISHED SOON.................
Saturday, October 31, 2009
MUTE CHAT ..
Two friend ::Samson(s) and Aryan(A)
A:what would you do if your god is being snatched away from you?
s:God is in my heart .so it is impossible.
s:what is love?
A:love is not a thought,it is felt.
s:Which you depends most of time-
1.Conscience
2.Heart
3.Mind
4.Arrogance
A:often we like to do what our heart wants but we should also know where to draw line and when to do what ,is controlled by one's conscience.
A:what is definition of Real friend?
s:True friendship is that relation which is made by heart not by mind or conscience.We cant find real friend by conscience as it depends on the purity of two hearts.And that golden moral::'a Friend in need is a friend indeed.'
Thank you..
you also can join...give your comment...
see down for more articles...
A:what would you do if your god is being snatched away from you?
s:God is in my heart .so it is impossible.
s:what is love?
A:love is not a thought,it is felt.
s:Which you depends most of time-
1.Conscience
2.Heart
3.Mind
4.Arrogance
A:often we like to do what our heart wants but we should also know where to draw line and when to do what ,is controlled by one's conscience.
A:what is definition of Real friend?
s:True friendship is that relation which is made by heart not by mind or conscience.We cant find real friend by conscience as it depends on the purity of two hearts.And that golden moral::'a Friend in need is a friend indeed.'
Thank you..
you also can join...give your comment...
see down for more articles...
Monday, September 7, 2009
#### TIME MANAGEMENT ####
TIME MANAGEMENT
--- Soumya Das
What is time?
Time has no particular definition. St Augustine remarked long ago, ‘I know what time is until someone asks me.’ But we know time has existence. We experience it. Time is money as it is a limited and valuable resource, but it is more precious than money and cannot be stored in bank. Time is our lives. What could be more important to you than using this free gift of time effectively, generously and wisely?
Can we manage time?
To manage means to control. It comes from a Latin word Manus: a hand.
In modern use managing implies Efficiency and Effectiveness.
Develop a personal sense of time
A vital difference:
Once Ulwais (Persian name) the sufi was asked, “What has brought grace to you”?
He replied, “When I wake in the morning I feel like a man who is not sure he will live till evening”.
Said the questioner, “But doesn’t everyone know this”?
Ulwais said, “They certainly do. But not all of them feel it”.
Everyone knows that time is limited, but few are aware of the fact.
It’s not enough to be busy. The question is: “What are you busy about?”
--HENRY THOREAU
Make the best use of your best time
Everyone has a best time in the day which gives 80% high quality output.
Generally for complicated works with hand best time is afternoon.
Our alertness becomes highest at noon.
Our short-term memory is best in the morning-in fact 15% more efficient than other time.
Final word
Time manage should be fun. Keep it as simple as possible. The wonderful thing is that tomorrow’s 24 hours now await you – untouched and unwasted. You are now in a position to make more effective use of your time. Now you can feel that you have a lot time to do a lot.
WRITTEN BY SOUMYA DAS.
CONTACT ME: soumya0303@gmail.com
--- Soumya Das
What is time?
Time has no particular definition. St Augustine remarked long ago, ‘I know what time is until someone asks me.’ But we know time has existence. We experience it. Time is money as it is a limited and valuable resource, but it is more precious than money and cannot be stored in bank. Time is our lives. What could be more important to you than using this free gift of time effectively, generously and wisely?
Can we manage time?
To manage means to control. It comes from a Latin word Manus: a hand.
In modern use managing implies Efficiency and Effectiveness.
Develop a personal sense of time
A vital difference:
Once Ulwais (Persian name) the sufi was asked, “What has brought grace to you”?
He replied, “When I wake in the morning I feel like a man who is not sure he will live till evening”.
Said the questioner, “But doesn’t everyone know this”?
Ulwais said, “They certainly do. But not all of them feel it”.
Everyone knows that time is limited, but few are aware of the fact.
It’s not enough to be busy. The question is: “What are you busy about?”
--HENRY THOREAU
Make the best use of your best time
Everyone has a best time in the day which gives 80% high quality output.
Generally for complicated works with hand best time is afternoon.
Our alertness becomes highest at noon.
Our short-term memory is best in the morning-in fact 15% more efficient than other time.
Final word
Time manage should be fun. Keep it as simple as possible. The wonderful thing is that tomorrow’s 24 hours now await you – untouched and unwasted. You are now in a position to make more effective use of your time. Now you can feel that you have a lot time to do a lot.
WRITTEN BY SOUMYA DAS.
CONTACT ME: soumya0303@gmail.com
Subscribe to:
Posts (Atom)